
AW: Massive VTX Probleme - help !
Hallo
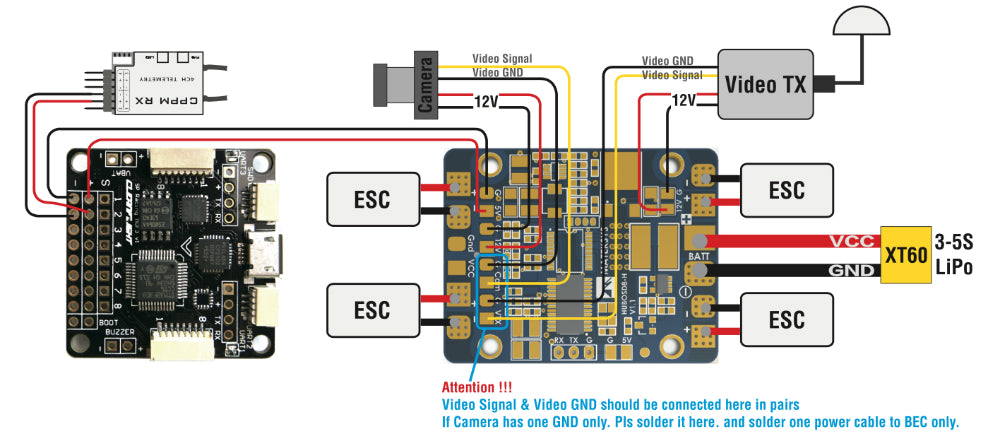
Wir haben beide ein problem lieber samu ..Die "zeichnung" die du da bearbeitet hast ist meine(POST 59)!Also meinst du die cam Versorgung direkt auf die 12 v oder halt vom osd ...und in die 5v Zuleitung fürs osd noch einen lc filter..Obwohl schon ein kondi dransitzt?Werde ich dann gleich am Freitag mal angehen..vorher finde ich leider keine zeit!geb natürlich Bescheid
..Die "zeichnung" die du da bearbeitet hast ist meine(POST 59)!Also meinst du die cam Versorgung direkt auf die 12 v oder halt vom osd ...und in die 5v Zuleitung fürs osd noch einen lc filter..Obwohl schon ein kondi dransitzt?Werde ich dann gleich am Freitag mal angehen..vorher finde ich leider keine zeit!geb natürlich Bescheid
Mfg micha
Hallo
Wir haben beide ein problem lieber samu
..Die "zeichnung" die du da bearbeitet hast ist meine(POST 59)!Also meinst du die cam Versorgung direkt auf die 12 v oder halt vom osd ...und in die 5v Zuleitung fürs osd noch einen lc filter..Obwohl schon ein kondi dransitzt?Werde ich dann gleich am Freitag mal angehen..vorher finde ich leider keine zeit!geb natürlich BescheidMfg micha








Kommentar