
Hallo zusammen,
beschäftige mich seit einiger Zeit mit Komponenten für einen Selbstbau Quadrokopter.
Von etlichen wird scheinbar das KK 2.1 Multirotor Board zur Steuerung verwendet.
Wenn ich es richtig sehe, bietet dieses Board aber keine GPS Unterstützung oder ?
Nun habe ich noch ein paar weitere Fragen zum Thema GPS-Unterstützung.
Welche guten Boards gibt es mit GPS Unterstützung ?
Wie kann man sich die GPS-Unterstützung vorstellen ? Wird da quasi wie beim Selfleveling
per Sender eine Funktion geschaltet und der Copter versucht dann nicht nur möglichst in der
Waage zu bleiben sondern versucht auch noch möglichst gut die Position zu halten ?
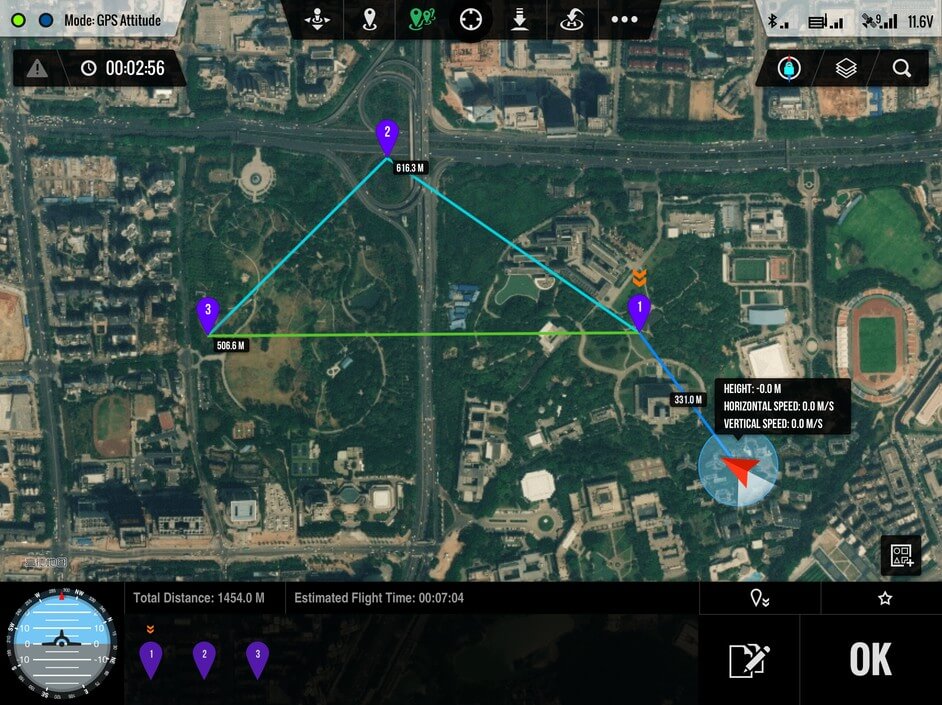
Sind mit irgendwelchen Bords auch "Coming Home" Funktionen möglich oder das Abfliegen von
vorgegebenen Koordinaten ? Wie würde so etwas funktionieren und wie würde man dem Board
mitteilen, welche Positionen in welcher Zeit abgeflogen werden sollen ?
Hoffe meine Fragen passen an dieser Stelle im Forum halbwegs.
Grüße,
Dirk
beschäftige mich seit einiger Zeit mit Komponenten für einen Selbstbau Quadrokopter.
Von etlichen wird scheinbar das KK 2.1 Multirotor Board zur Steuerung verwendet.
Wenn ich es richtig sehe, bietet dieses Board aber keine GPS Unterstützung oder ?
Nun habe ich noch ein paar weitere Fragen zum Thema GPS-Unterstützung.
Welche guten Boards gibt es mit GPS Unterstützung ?
Wie kann man sich die GPS-Unterstützung vorstellen ? Wird da quasi wie beim Selfleveling
per Sender eine Funktion geschaltet und der Copter versucht dann nicht nur möglichst in der
Waage zu bleiben sondern versucht auch noch möglichst gut die Position zu halten ?
Sind mit irgendwelchen Bords auch "Coming Home" Funktionen möglich oder das Abfliegen von
vorgegebenen Koordinaten ? Wie würde so etwas funktionieren und wie würde man dem Board
mitteilen, welche Positionen in welcher Zeit abgeflogen werden sollen ?
Hoffe meine Fragen passen an dieser Stelle im Forum halbwegs.
Grüße,
Dirk






Kommentar